Pourquoi nous faire confiance à votre entreprise?
Nous sortons la panique des achats. Nous stockons des millions de pièces difficiles à trouver provenant de nos sources fiables. Nous actualisons nos listes de produits en quelques minutes et les achats en ligne sont effectués en temps réel et expédiés tous les jours.
Fondée en 2002, MFGChips est un chef de file local de la distribution de composants électroniques et est également reconnue comme l'une des entreprises les plus respectées et les plus innovantes sur le marché local. MFGChips, dont le siège social est situé à Hong Kong, a acquis une réputation impressionnante en matière de service exceptionnel et de développement de solutions efficaces et complètes pour la chaîne logistique mondiale.
Apprendre encore plus >
Les robots obtiennent les pieds inspirés des orignaux
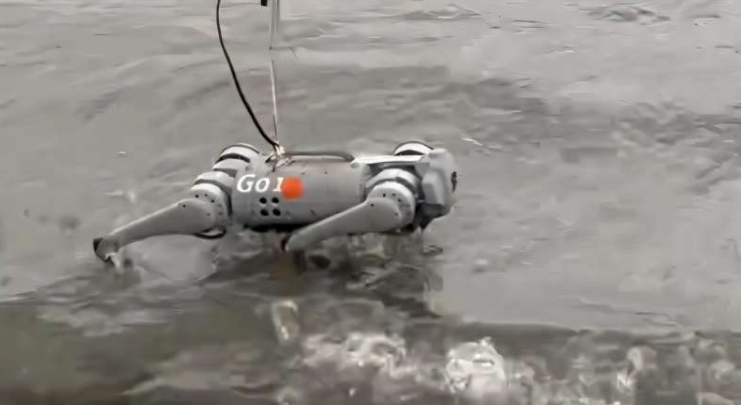
Des chercheurs de l'Université de technologie de Tallinn (Taltech) ont créé un nouveau type de pieds de robot bio-inspirés conçus pour améliorer la mobilité sur des surfaces difficiles comme la boue et la neige humide.Leur étude souligne comment ces innovations pourraient permettre aux robots de naviguer dans des terrains naturels complexes, soutenant la surveillance environnementale, l'agriculture et la réponse aux catastrophes.
Alors que les robots à pattes sont étudiés depuis des décennies et continuent de devenir plus économes en énergie et adaptables, certains terrains naturels restent particulièrement difficiles.Ces nouveaux pieds visent à surmonter ces obstacles en améliorant la façon dont les robots ajustent leurs mouvements à différentes conditions de sol.
Les expériences en laboratoire avec de vrais orignaux ont confirmé leur fonctionnalité unique.Lorsque vous entrez et hors de la boue, les sabots divisés de l'orignal se dilatent et se contractent, ajustant leur zone de contact.Cependant, le principal avantage n'est pas l'augmentation de la surface.Au lieu de cela, il provient de la façon dont les sabots clivenus brisent la force d'aspiration lorsqu'ils sont sortis de la boue.
Les chercheurs ont observé que le sabot d'un orignal fonctionnait de manière similaire à une tasse à vent.En ajustant sa forme, le sabot brise la force d'aspiration créée par la boue, un peu comme la fixation d'une sous-coupe d'une surface.La boue se comporte de manière similaire à une tuile de salle de bain humide, générant une aspiration sous les pieds de l'animal, ce qui rend le soulèvement de la jambe difficile.Le mouvement des sabots perturbe cette tension, facilitant le mouvement plus facile.Les sabots rendent le mouvement plus rapide et plus économe en énergie, empêchant des situations potentiellement mortelles où l'animal pourrait couler trop profondément, se coincer et périr.
Inspirés par cela, les chercheurs ont développé des pieds de silicone pour un robot à pattes qui imite le même comportement.Les tests sur les surfaces boueuses ont montré que cette simple modification réduisait de moitié le saignage et la force d'aspiration du robot, ce qui réduit sa consommation d'énergie jusqu'à 70%.
Selon les chercheurs, aucun inconvénient n'a été identifié avec les pieds «robo-moose» modifiés.
Alors que les robots à pattes sont étudiés depuis des décennies et continuent de devenir plus économes en énergie et adaptables, certains terrains naturels restent particulièrement difficiles.Ces nouveaux pieds visent à surmonter ces obstacles en améliorant la façon dont les robots ajustent leurs mouvements à différentes conditions de sol.
Les expériences en laboratoire avec de vrais orignaux ont confirmé leur fonctionnalité unique.Lorsque vous entrez et hors de la boue, les sabots divisés de l'orignal se dilatent et se contractent, ajustant leur zone de contact.Cependant, le principal avantage n'est pas l'augmentation de la surface.Au lieu de cela, il provient de la façon dont les sabots clivenus brisent la force d'aspiration lorsqu'ils sont sortis de la boue.
Les chercheurs ont observé que le sabot d'un orignal fonctionnait de manière similaire à une tasse à vent.En ajustant sa forme, le sabot brise la force d'aspiration créée par la boue, un peu comme la fixation d'une sous-coupe d'une surface.La boue se comporte de manière similaire à une tuile de salle de bain humide, générant une aspiration sous les pieds de l'animal, ce qui rend le soulèvement de la jambe difficile.Le mouvement des sabots perturbe cette tension, facilitant le mouvement plus facile.Les sabots rendent le mouvement plus rapide et plus économe en énergie, empêchant des situations potentiellement mortelles où l'animal pourrait couler trop profondément, se coincer et périr.
Inspirés par cela, les chercheurs ont développé des pieds de silicone pour un robot à pattes qui imite le même comportement.Les tests sur les surfaces boueuses ont montré que cette simple modification réduisait de moitié le saignage et la force d'aspiration du robot, ce qui réduit sa consommation d'énergie jusqu'à 70%.
Selon les chercheurs, aucun inconvénient n'a été identifié avec les pieds «robo-moose» modifiés.